Abstract
In this demonstration we consider the nonlinear pendulum problem, \(\theta'' + c\,\theta' + k\,\sin(\theta) = 0\) and look at the linearization near the two types of critical points, \(\theta = 2n\pi\) and \(\theta = (2n+1)\pi\) (\(n\) any integer).
Use Cases
Lecture: The presentation of the nonlinear problem and the linearization at the different critical points are straightforward. The demonstration may then illustrate the linear and nonlinear phase portraits.
Outside of Lecture: Find all critical points of this equation, and do a linear analysis to determine behaviors at each. Verify that your analysis gives the same phase portraits as are shown in the demonstration.
Model Description
This considers the nonlinear pendulum problem with (or without)
damping, shown in the figure below.
ODE Model
Following [1] or [2], this is modeled by \[ \theta'' + c\,\theta' + k\,\sin\theta = 0, \] where \(c = d/m\), the damping coefficient for the motion divided by the mass of the pendulum, and \(k = g/L\), the acceleration due to gravity divided by the length of the pendulum. Rewriting this as a system with \(x = \theta\) and \(y = \theta'\), we have \[\begin{align} x' &= y \\ y' &= -k\sin(x) - c\,y.\end{align} \]
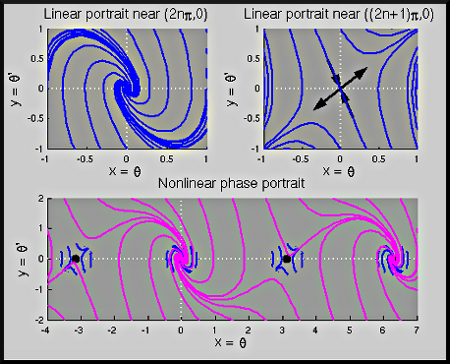
Equilibrium points are found as usual to be \((n\pi, 0)\), for integers \(n\). Linearizing at these, we find two behaviors; at even multiples of \(\pi\) and at \(x = 0\), the coefficient matrix is \(\begin{pmatrix} 0 & 1\\ -k & -c\end{pmatrix} \), and at odd multiples, \(\begin{pmatrix} 0 & 1\\ k & -c\end{pmatrix} \). Sketching the phase portraits for each of these proceeds as expected.
Matlab Demos
Our demonstrations here show the solutions near each equilibrium solution, and those solutions in the full phase plane.
- Nonlinear_Pendulum.m:
A demonstration that plots the linearized phase portraits and the
full phase plane. Pauses are inserted between setting up the
graphs; plotting the linear phase portrait for \(x = 2n\pi\); adding
this behavior to the full phase plane; plotting the linear phase
portrait for \(x = (2n+1)\pi\); adding that to the full phase plane;
and plotting nonlinear trajectories in the full phase plane.
Note: also requires the files
plot_eigenvectors.m,
plot_solutiontraj.m,
plot_localtraj.m, and
arrow.m
(downloads as a zip file with the Matlab file and license).
[show
figure]