Abstract
This is the standard mass-spring-dashpot model. The general solution may be easily obtained by guessing \(x = e^{rt}\), and particular solutions found by specifying different initial conditions. These demonstrations provide graphs of the solutions for different initial conditions, and an animation showing how the solutions reflect the actual motion of the mass on the spring.
Use Cases
Lecture: The mass-spring-dashpot model can again be presented with little derivation, though some emphasis of the physics behind the different terms may be appropriate in this case. The demonstrations are intended to provide insight into how the solution curves reflect the actual motion of the mass on the spring. The default values for in the demonstration are \(m=1\), \(c=1\) and \(k=8\) (so that \(r = -0.5\pm i\sqrt{7.75}\)).
Outside of Lecture Consider \(m = 1\), \(c = 1\) and \(k = 8\) and solve the initial value problem with \(x(0) = 1\), \(x(0) = 2\),... \(x(0) = 5\) and \(x'(0) = 0\). Check that the solutions you obtain are consistent with the animation and solutions shown in the demonstrations.
Model Description
This is the standard mass-spring model leading to a second-order linear
constant-coefficient ordinary differential equation. We consider a mass
attached to a spring, as suggested by the figure below.
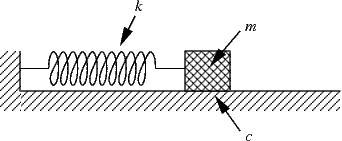
Here we have labeled the spring with its Hooke's-law constant \(k\), the
mass \(m\), and the floor with a coefficient of friction, \(c\).
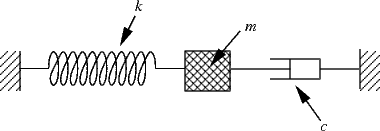
We shall also represent this with a circular mass with friction
suggested by a "dashpot," against which the mass assembly rubs, as shown
below.
ODE Model
Let \(x\) be the displacement of the mass from its equilibrium position. Then, assuming a Hooke's-law spring and that the resistance is a viscous damping force, the restoring force of the spring is \(F_s = -k x\) and damping force is \(F_R = -c x'\). Then, applying Newton's law (and assuming no external force on the system), we have \[ m\,x'' = \mbox{sum of forces} = -c\,x' - k\,x, \] or \[ m\,x'' + c\,x' + k\,x = 0. \]
We can obviously solve this easily by taking \(x = e^{rt}\).
Matlab Demos
As usual, we consider a number of Matlab demos for this:
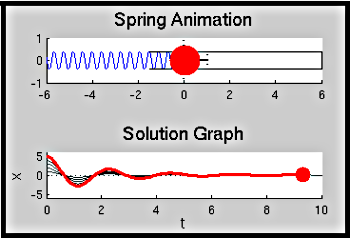
- Spring_Animation.m:
A demonstration that shows an animation of the spring at the same
time as it traces out the solution parametrically. It generates
solutions for a list of initial conditions, specified in the
configuration section of the file; a list of initial positions
\(x(0) = x_0\) or initial velocities \(x'(0) = v(0) \) may be
specified. Each is animated in sequence, with a pause between each
graph.
[show
figure]
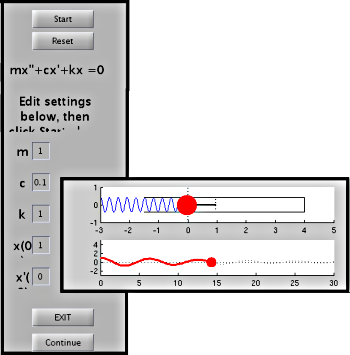
- Spring_Animation_GUI.m:
A demonstration that does the same animation, but which provides a
GUI interface to set the values of \(m\), \(c\), \(k\), \(x_0\) and
\(v_0\) and then set the animation in motion.
[show
figure]
Looking at the Model
Some questions that may be worth considering:
- Pick values of \(m\), \(c\) and \(k\) that give underdamped, critically damped, and overdamped solutions. How can you determine which case is being considered from the solution curve? From the behavior of the spring?
- How are these three cases related to the roots of the characteristic equation? How can these roots then be related to the observed behavior?
